
Active entanglement of filament-like soft actuators enables stochastic, topological grasping.

Kirigami-based metamaterial structures inverse-designed to transform between two shapes. Two methods of fabricating the resulting designs.

Large arrays of dip coated soft actuators that are mechanically programmed with gravity, fiber inclusions, surface tension, and electric fields.

Arrays of 2DOF miniature soft actuators powered by microfluidic circuits.

Artificial octopus suckers. Exploring the effects of infundibular disc morphology.

Tunable friction for soft finger tips via inflation of an elastomeric membrane. Friction engagement can be coupled to the actuation of pneumatic fingers or controlled by an independent input.

RAD sampler. Custom gaskets design and fabrication for the RAD sampler. The gaskets add gentle closure for sample protection and an integrated flexure profile for overdrive protection of the sampler structure.

Squishy robot fingers for gentle grasping in the deep-sea.
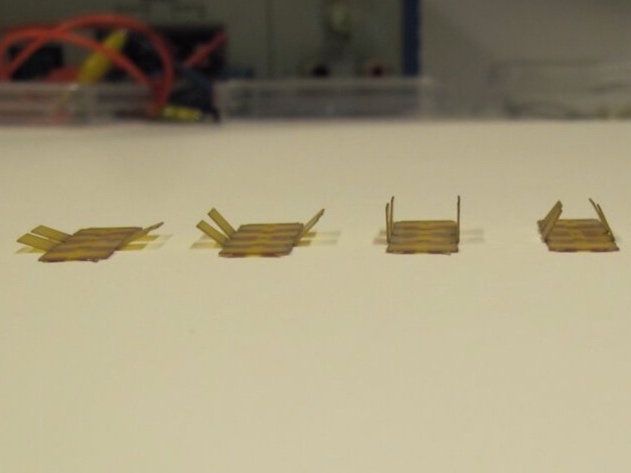
Millimeter scale self-folding structures.

UV reactor for purifying water flowing up to 100GPM. Lead CFD efforts, custom hardware design and fabrication, and testing for custom ‘bulb out of water’ setup.
Roll-to-roll replica molding of polymeric photonic sensors.

Highly aligned electrospun nanowire stacks for GRIN surface coatings.

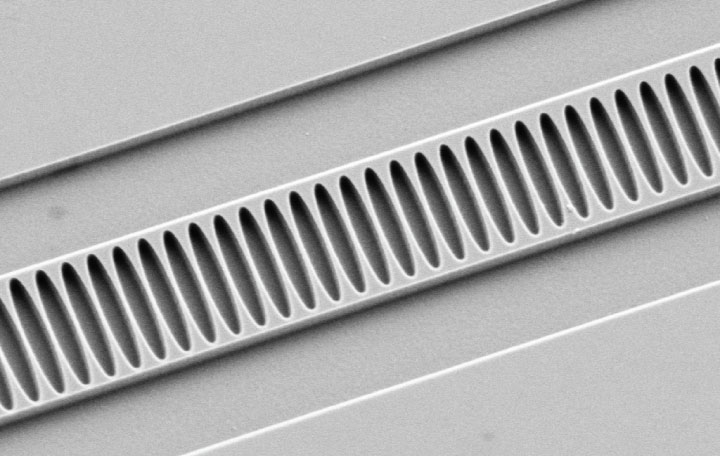
High throughput electrospinning for filtration materials.

Electronic assembly of subcutaneous defibrillators. Image from Cameron Health.

Construction and characterization of experimental musical instruments.